Die_Beerery
Well-Known Member
- Joined
- Aug 21, 2017
- Messages
- 842
- Reaction score
- 643
Those sensors are digital. No calibration needed

I noticed the delay on rise vs on fall also and was a bit flustered!This looks good seems like you're on track to get it going with BC. I peaked a bit more on the trends you posted earlier e.g this one, I notice that when you increase the setpoint there is a lag before the output starts to increase. The same lag is not there when decreasing setpoint and the output starts to decrease. That might be the same issue I saw when testing which might be related to integral clamping, what do you think @BrunDog ?
I noticed the delay on rise vs on fall also and was a bit flustered!
I think this third point is REALLY solid. There is no doubt in my mind this is where most noise problems come from. Do you have any recommended inline noise filters?




![Craft A Brew - Safale S-04 Dry Yeast - Fermentis - English Ale Dry Yeast - For English and American Ales and Hard Apple Ciders - Ingredients for Home Brewing - Beer Making Supplies - [1 Pack]](https://m.media-amazon.com/images/I/41fVGNh6JfL._SL500_.jpg)






Thinking out loud. Surge protectors have MOVs, albeit rated much higher than these like MOVs linked here.The keys are isolation and suppression. Proper grounding into a STAR pattern matters too to eliminate ground loops.
1. Separate high and low voltage wires. Eliminate loops where possible - they act as antennas.
2. Use shielded wire, with the shield tied to ground at the enclosure side only. Or use twisted wire - this reduces antenna affect.
3. Use solid state or electric switches (relays, e.g. SSRs or MOSFETs) over electromechanical ones (cube relays) where possible. For inductive loads, for DC circuits, use reverse-biased diodes (e.g. 1N4007) and for AC circuits use MOVs (Metal Oxide Varistors) and/or snubbers (R-C network).
For the MOVs, we have tested these with good success. Anything for 120V will likely work though: https://www.digikey.com/product-det...onic-components/ERZ-E14A201/P15585-ND/3694124
Hmm are you sure the integral minimum is clamped to zero? If I set up a PID with a small gain and medium Ki it integrates nice to 100% on a small error. When I give it a small negative error it moves nice down to zero and back up again if I give it a positive error again. But, if I give it a large negative error it moves rapid from 100% to zero, naturally, but if I then from there gives it the same small positive error it takes forever before to output starts to rise from zero, indicating that the integral did not stop at zero? I played with the max integral setting while doing this and to me it seems like the integral is clamped to the negative value of the max integral? I have tested on the Feather and Sonoff maybe its firmware related just to them? I agree with you for a brewery controller the integral should be clamped to zero not negative max.
Ok, verified this. And you were correct. Somewhere in testing, we must have flipped the switch to allow clamping at negative max rather than zero. So now the call... what do we do? For brewing and unidirectional heating or cooling, negative integration doesn't make sense. But in the application above where a valve is being used to control flow, it should be allowed. Thoughts?
Ok, verified this. And you were correct. Somewhere in testing, we must have flipped the switch to allow clamping at negative max rather than zero. So now the call... what do we do? For brewing and unidirectional heating or cooling, negative integration doesn't make sense. But in the application above where a valve is being used to control flow, it should be allowed. Thoughts?
Ok, verified this. And you were correct. Somewhere in testing, we must have flipped the switch to allow clamping at negative max rather than zero. So now the call... what do we do? For brewing and unidirectional heating or cooling, negative integration doesn't make sense. But in the application above where a valve is being used to control flow, it should be allowed. Thoughts?
Thanks for the info, I really appreciate the help as I am new to Bru Control. What I meant was that I eventually want to offset the reading for a nominal value. I have 3 temp probes, top left, middle center and bottom right as I can slightly change the air direction and flow, so I will record, evaluate, adjust the airflow then look at the 3 values after some time and average them, and then leave just one temp probe in long term. I want to be able to offset that reading a few degrees one way or the other so the value I am using in bru control is the closest to the actual temp of the ferm chamber and wort. Does Bru Control allow for an 1 wire temp offset? A better long term solution will be a mounted 1 wire water tight prob into my conical, but Im not there yet. Thanks again for your help, all of us in the brew community thank you and everyone that help us newbies.Those sensors are digital. No calibration needed
There it is.. Temp averaging.. I know this was not your direct question.. but it clicked in my head.

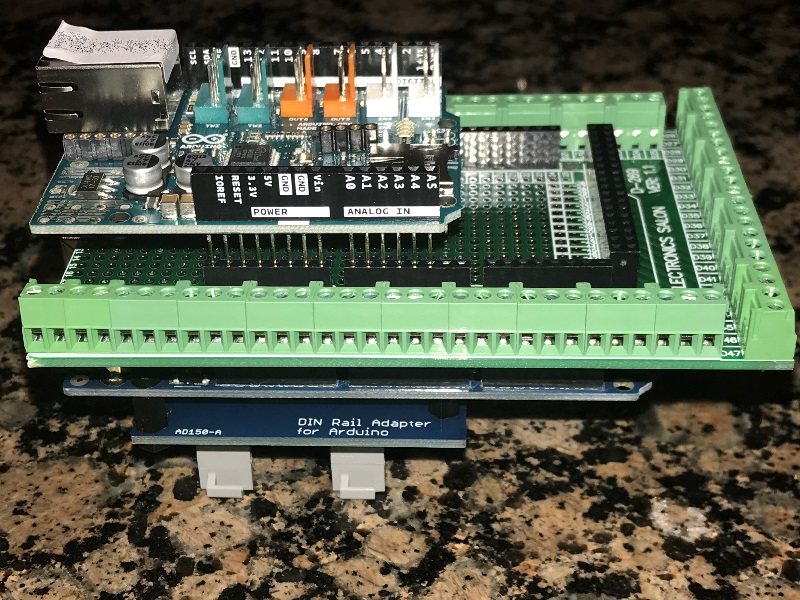
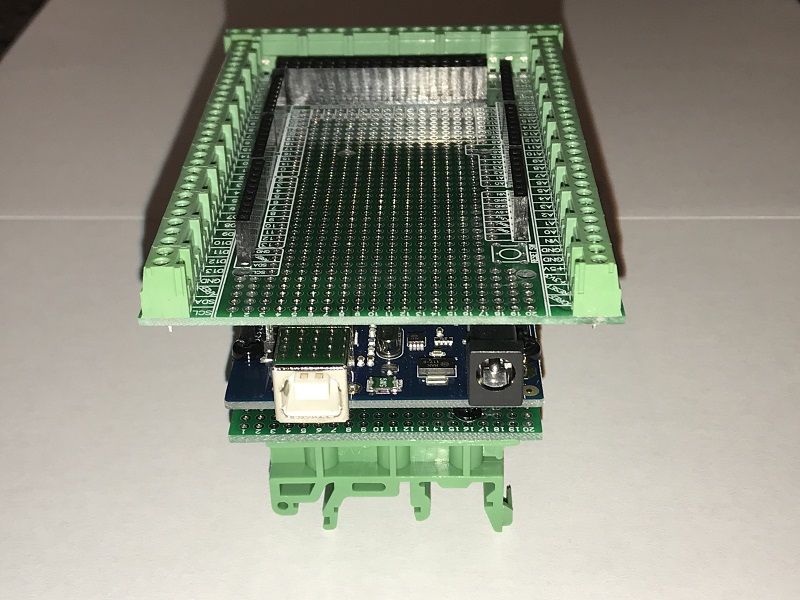
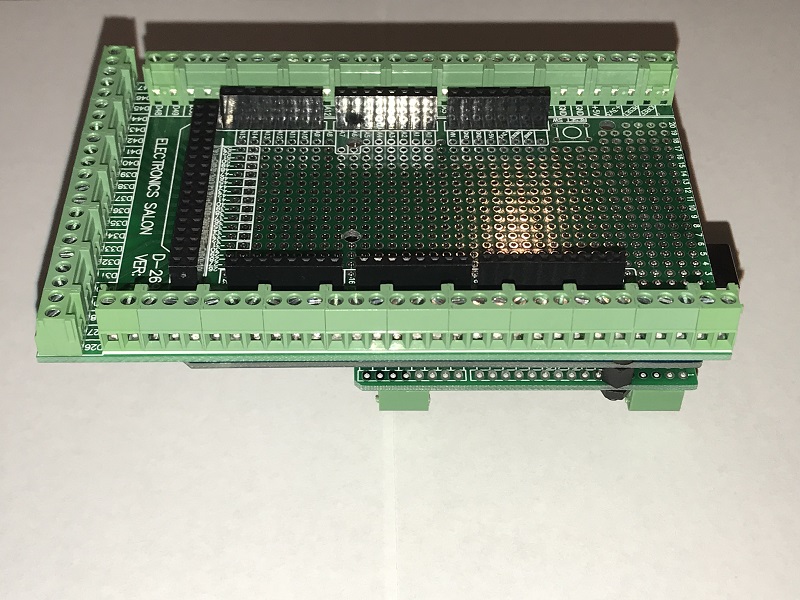
which screwshield? 'board kit' or 'din rail mount'(using order list terminology)
If using the 'board kit', did you add the 2x3 header?
If using Din Rail Mount, are you following what Die_Beerey did?