
Fdamata
Well-Known Member
- Joined
- Dec 16, 2013
- Messages
- 520
- Reaction score
- 53
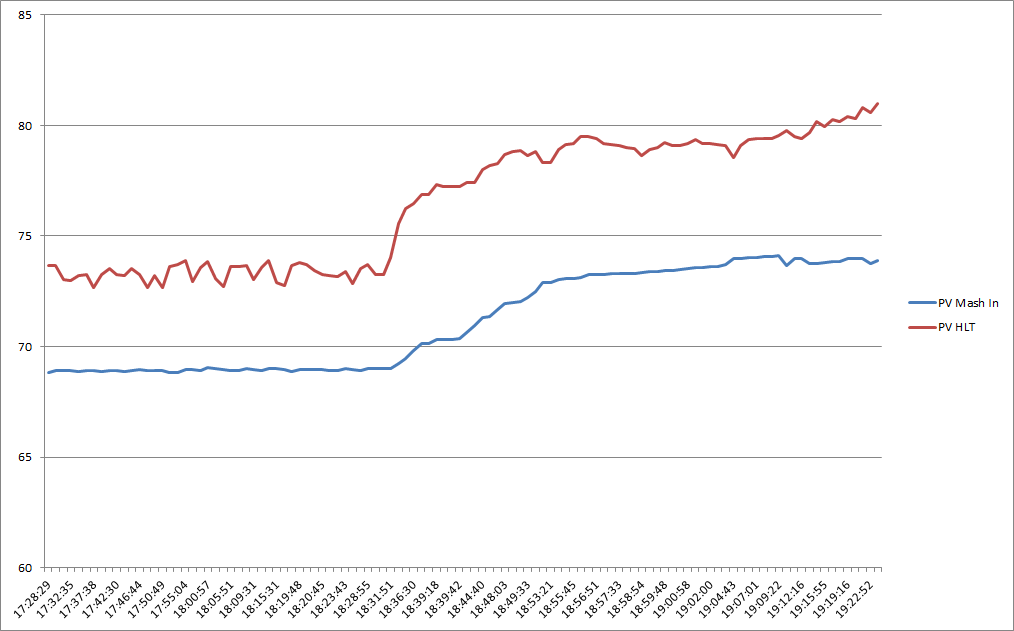
Pessoal, fiz algumas modificacoes no codigo do Brewpi para utiliza-lo como controlador da brassagem com Arduino e Debian. Meu sistema produz proximo de 50-55 L de cerveja, geralmente sao 32,5 L de agua na brassagem, com 40 L de agua para lavagem e uma resistencia de 5000 W. Utilizo toda a agua da lavagem como fluido de aquecimento do meu mosto em um sistema HERMS.
Testei o meu sistema de controle apenas com agua no sabado e ao tentar aquecer de 69 graus C para 76 graus C houve uma demora muito grande que estou atribuindo à correcao do derivativo e tambem por um ganho proporcional relativamente pequeno. Testarei desabilitar o derivativo e aumentar um pouquinho o proporcional, mas se tolerar overshooting elevado.
A minha pergunta é: como esta a configuracao dos ganhos do PID que vcs utilizam e para quais volumes?
Os meus parametros atuias sao: Kp: 7, Ki: 0,125 e Kd: -3. A sintonia de malhas de controle preve a aplicacao de uma perturbacao em malha aberta, porem o meu sistema nao é de controle continuo (é on-off com PID) e estou com dificuldade, principalmente de tempo, de achar material que fale de calibracao de malhas desta tipologia.
Sds,
Fabiano da Mata
Testei o meu sistema de controle apenas com agua no sabado e ao tentar aquecer de 69 graus C para 76 graus C houve uma demora muito grande que estou atribuindo à correcao do derivativo e tambem por um ganho proporcional relativamente pequeno. Testarei desabilitar o derivativo e aumentar um pouquinho o proporcional, mas se tolerar overshooting elevado.
A minha pergunta é: como esta a configuracao dos ganhos do PID que vcs utilizam e para quais volumes?
Os meus parametros atuias sao: Kp: 7, Ki: 0,125 e Kd: -3. A sintonia de malhas de controle preve a aplicacao de uma perturbacao em malha aberta, porem o meu sistema nao é de controle continuo (é on-off com PID) e estou com dificuldade, principalmente de tempo, de achar material que fale de calibracao de malhas desta tipologia.
Sds,
Fabiano da Mata





















![Craft A Brew - Safale BE-256 Yeast - Fermentis - Belgian Ale Dry Yeast - For Belgian & Strong Ales - Ingredients for Home Brewing - Beer Making Supplies - [3 Pack]](https://m.media-amazon.com/images/I/51bcKEwQmWL._SL500_.jpg)























