/********** ITDB02 Networked Temperature **********
This program requires the ITDB02_Graph16 library.
It uses the OneWire Library and an Arduino-compatable
ethernet shield The display can be used with small or
large fonts, and in portrait or landscape mode.
The OneWire runs on digital pin 9 to avoid a conflict
with the LCD software.
**************************************************/
/********** Various Defines **********/
// #define SerialDebug // Used for debugging with the Serial Terminal, disable for normal use
// #define GetAddresses // Used to get Sensor Addresses
// #define EthernetDebug // Used to debug Ethernet problems
// #define P15X16 // define 15 column by 16 row display in portrait mode
// #define P30X21 // define 30 column by 21 row display in portrait mode
// #define L40X16 // define 40 column by 20 row display in landscape mode
// #define L20X12 // define 20 column by 15 row display in landscapr mode
#include <Wire.h>
#include <ITDB02_Graph16.h>
#include <SPI.h>
#include <Ethernet.h>
#include <OneWire.h>
// Declare which fonts we will be using
#if defined P30X21
extern uint8_t SmallFont[];
char *blankLine = " ";
#endif
#if defined L40X16
extern uint8_t SmallFont[];
char *blankLine = " ";
#endif
#if defined P15X16
extern uint8_t BigFont[];
char *blankLine = " ";
#endif
#if defined L20X12
extern uint8_t BigFont[];
char *blankLine = " ";
#endif
//myGLCD(RS,WR,CS,RST,ALE,mode);
ITDB02 myGLCD(A1,A2,A0,A4,A5,2); //
const byte nbsp = 0x20; // space character
const byte zeroChar = 0x30; // zero character
const char degChar = 0xdf; // degree character
const byte orientLandscape = 0x01;
const byte orientPortrait = 0x00;
// if set to TRUE, blank lines are printed for lines with no probe
// if set to FALSE, lines with no probe are marked in yellow
bool showBlankLine = TRUE;
/********** Ethernet / Web Stuff **********
Enter a MAC address and IP address for your controller below.
The IP address will be dependent on your local network:
The Ethernet hardware utilizes digital pins 10, 11, 12, and 13.
********** Ethernet / Web Stuff **********/
byte mac[] = { 0xDE, 0xAD, 0xBA, 0xBE, 0x00, 0x04 };
IPAddress ip(192,168,1,175);
const int BUFSIZE = 100; // buffer for internet request
const int rowSize = 4;
// Initialize the Ethernet server library
// with the IP address and port you want to use
// (port 80 is default for HTTP):
EthernetServer server(80);
/********** OneWire Stuff ************/
const int dsDataPin = 9; // One Wire data Bus
OneWire ds(dsDataPin); // OneWire bus on pin 2
bool showCelsius = FALSE;
typedef struct
{
bool sensorActive; // set to "TRUE" if you put a sensor address in the "addr" array.
char *sensorName;
char *xmlName;
byte addr[8];
float deg;
int tooCold; // if temperature is below this value, display is blue
int tooHot; // if temperature is above this value, display is red
} Sensor;
#if defined P15X16
const int maxSensors = 16; // total number of DS18B20 sensors
Sensor ds18[maxSensors] =
{
{FALSE, "Sensor 1", "Sensor1", {0,0,0,0,0,0,0,0}, 0.0, 90, 100},
{FALSE, "Sensor 2", "Sensor2", {0,0,0,0,0,0,0,0}, 0.0, 70, 80},
{FALSE, "Sensor 3", "Sensor3", {0,0,0,0,0,0,0,0}, 0.0, 70, 90},
{FALSE, "Sensor 4", "Sensor4", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 5", "Sensor5", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 6", "Sensor6", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 7", "Sensor7", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 8", "Sensor8", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 9", "Sensor9", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 10", "Sensor10", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 11", "Sensor11", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 12", "Sensor12", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 13", "Sensor13", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 14", "Sensor14", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 15", "Sensor15", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 16", "Sensor16", {0,0,0,0,0,0,0,0}, 0.0, 45, 55}
};
#endif
#if defined L20X12
const int maxSensors = 12; // total number of DS18B20 sensors
Sensor ds18[maxSensors] =
{
{FALSE, "Sensor 1", "Sensor1", {0,0,0,0,0,0,0,0}, 0.0, 90, 100},
{FALSE, "Sensor 2", "Sensor2", {0,0,0,0,0,0,0,0}, 0.0, 70, 80},
{FALSE, "Sensor 3", "Sensor3", {0,0,0,0,0,0,0,0}, 0.0, 70, 90},
{FALSE, "Sensor 4", "Sensor4", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 5", "Sensor5", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 6", "Sensor6", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 7", "Sensor7", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 8", "Sensor8", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 9", "Sensor9", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 10", "Sensor10", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 11", "Sensor11", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 12", "Sensor12", {0,0,0,0,0,0,0,0}, 0.0, 45, 55}
};
#endif
#if defined P30X21
const int maxSensors = 21; // total number of DS18B20 sensors
Sensor ds18[maxSensors] =
{
{FALSE, "Sensor 1", "Sensor1", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 2", "Sensor2", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 3", "Sensor3", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 4", "Sensor4", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 5", "Sensor5", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 6", "Sensor6", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 7", "Sensor7", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 8", "Sensor8", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 9", "Sensor9", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 10", "Sensor10", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 11", "Sensor11", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 12", "Sensor12", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 13", "Sensor13", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 14", "Sensor14", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 15", "Sensor15", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 16", "Sensor16", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 17", "Sensor17", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 18", "Sensor18", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 19", "Sensor19", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 20", "Sensor20", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 21", "Sensor21", {0,0,0,0,0,0,0,0}, 0.0, 45, 55}
};
#endif
#if defined L40X16
const int maxSensors = 16; // total number of DS18B20 sensors
Sensor ds18[maxSensors] =
{
{FALSE, "Sensor 1", "Sensor1", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 2", "Sensor2", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 3", "Sensor3", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 4", "Sensor4", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 5", "Sensor5", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 6", "Sensor6", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 7", "Sensor7", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 8", "Sensor8", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 9", "Sensor9", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 10", "Sensor10", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 11", "Sensor11", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 12", "Sensor12", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 13", "Sensor13", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 14", "Sensor14", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 15", "Sensor15", {0,0,0,0,0,0,0,0}, 0.0, 45, 55},
{FALSE, "Sensor 16", "Sensor16", {0,0,0,0,0,0,0,0}, 0.0, 45, 55}
};
#endif
/********** IMPORTANT!! **********
BE SURE TO SET THIS VALUE TO THE
NUMBER OF ACTIVE SENSORS!!
*********** IMPORTANT!! **********/
int activeSensors = 0;
int cnt = 0;
void setup()
{
#if defined SerialDebug || defined GetAddresses || defined EthernetDebug
Serial.begin(9600);
delay(1000);
Serial.println(F("Serial Debug running"));
#endif
#if defined P15X16 || defined P30X21
myGLCD.InitLCD(PORTRAIT);
#endif
#if defined L40X16 || defined L20X12
myGLCD.InitLCD(LANDSCAPE);
#endif
#if defined P15X16 || defined L20X12
myGLCD.setFont(BigFont);
#endif
#if defined L40X16 || defined P30X21
myGLCD.setFont(SmallFont);
#endif
#if defined SerialDebug
Serial.println(F("InitLCD"));
#endif
myGLCD.clrScr();
myGLCD.setBackColor(0,0,0);
myGLCD.fillScr(0,0,0);
// start the Ethernet connection and the server:
Ethernet.begin(mac, ip);
server.begin();
#if defined SerialDebug || defined EthernetDebug
Serial.print("server is at ");
Serial.println(Ethernet.localIP());
#endif
}
void checkEthernet(void)
{
char clientline[BUFSIZE];
int index = 0;
// listen for incoming clients
EthernetClient client = server.available();
if (client) {
Serial.println("new client");
// an http request ends with a blank line
boolean currentLineIsBlank = true;
while (client.connected())
{
if (client.available())
{
char c = client.read();
// If it isn't a new line, add the character to the buffer
if (c != '\n' && c != '\r')
{
clientline[index] = c;
index++;
// are we too big for the buffer? start tossing out data
if (index >= BUFSIZE)
index = BUFSIZE -1;
// continue to read more data!
continue;
}
// got a \n or \r new line, which means the string is done
clientline[index] = 0;
// Print it out for debugging
Serial.println(clientline);
// if you've gotten to the end of the line (received a newline
// character) and the line is blank, the http request has ended,
// so you can send a reply
if (c == '\n' && currentLineIsBlank)
{
if((strstr(clientline, "GET / ") != 0) ||
(strstr(clientline, "index.htm") != 0) ||
(strstr(clientline, "index.html") != 0))
{
// send a standard http response header
client.println(F("HTTP/1.1 200 OK"));
client.println(F("Content-Type: text/html"));
client.println(F("Connnection: close"));
client.println();
client.println(F("<!DOCTYPE HTML>"));
client.println("<html><head>");
// add a meta refresh tag, so the browser pulls again every 5 seconds:
client.println(F("<meta http-equiv=\"refresh\" content=\"5\">"));
client.println(F("</head>"));
client.println(F("<body><table border=\"5\" align=\"center\"><tr>"));
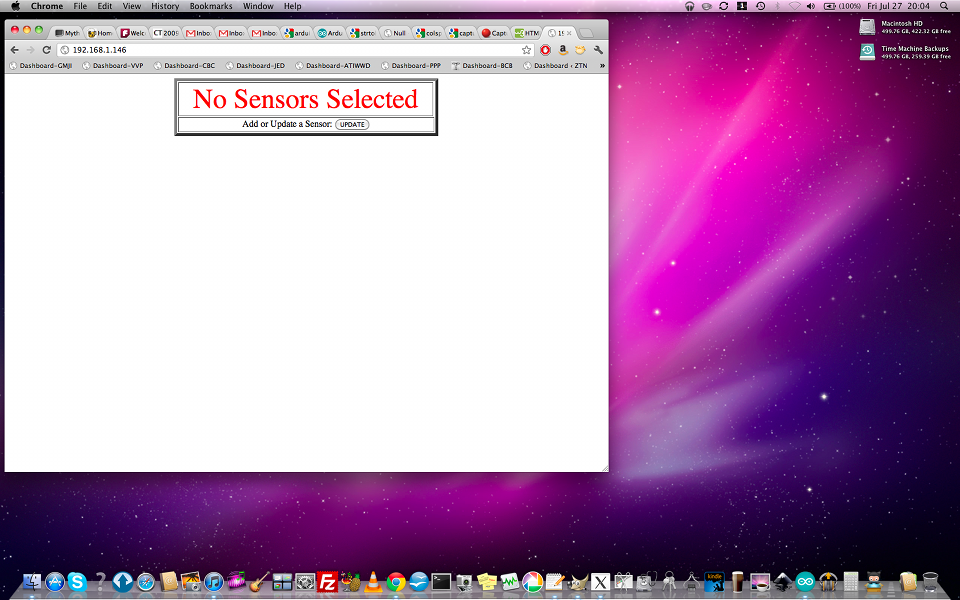
if(activeSensors == 0)
{
client.println(F("<td align=\"center\" valign=\"center\"><font size=\"10\" color=\"red\"> No Sensors Selected </font></td></tr></table></body></html>"));
break;
}else{
for (int n=0; n<activeSensors; n++)
{
if(n<=maxSensors)
{
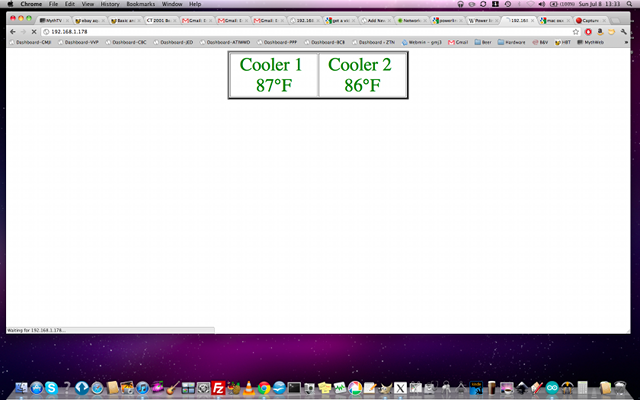
client.print(F("<td align=\"center\" valign=\"center\"><font size=\"10\"> "));
if((int)ds18[n].deg > ds18[n].tooHot)
{
client.print(F("<font color=\"red\">"));
}else if((int)ds18[n].deg < ds18[n].tooCold){
client.print(F("<font color=\"blue\">"));
}else{
client.print(F("<font color=\"green\">"));
}
client.print(ds18[n].sensorName);
client.print(F(" <br />"));
client.print(ds18[n].deg, 0);
if (showCelsius == TRUE)
{
client.print(F("°C"));
}else{
client.print(F("°F"));
}
client.println(F("</font></font></td>"));
}
if((n+1) % rowSize == 0)
{
client.println(F("</tr><tr>"));
}
}
client.println(F("</tr></table></body>"));
client.println(F("</html>"));
break;
}
}else if (strstr(clientline, "buttcrack.xml") !=0){
#if defined SerialDebug
Serial.print(F("Sending buttcrack.xml..."));
#endif
client.println(F("<?xml version=\"1.0\" encoding=\"ISO-8859-1\"?>"));
client.println(F("<!--Arduino Buttcrack-->"));
client.println(F("<buttcrack>"));
for (int n = 0; n < activeSensors; n++)
{
client.print(F("<"));
client.print(ds18[n].xmlName);
client.print(F(">"));
client.print(ds18[n].deg,0);
client.print(F("</"));
client.print(ds18[n].xmlName);
client.println(F(">"));
}
client.println(F("</buttcrack>"));
delay(1);
client.stop();
}else{
// everything else is a 404
client.println(F("HTTP/1.1 404 Not Found"));
client.println(F("Content-Type: text/html"));
client.println();
client.println(F("<h2>File Not Found</h2>"));
delay(1);
client.stop();
}
if (c == '\n') {
// you're starting a new line
currentLineIsBlank = true;
} else if (c != '\r') {
// you've gotten a character on the current line
currentLineIsBlank = false;
}
}
}
}
// give the web browser time to receive the data
delay(1);
// close the connection:
client.stop();
#if defined SerialDebug || defined EthernetDebug
Serial.println(F("client disonnected"));
#endif
}
}
void getOneWire(void)
{
byte i;
byte present = 0;
byte type_s;
byte data[12];
#if defined SerialDebug
Serial.print(F("ROM "));
Serial.print(cnt);
Serial.print(F(" = "));
for( i = 0; i < 8; i++)
{
Serial.write(nbsp);
if(ds18[cnt].addr[i] < 16){Serial.write(zeroChar);} // prepend hex 0-15 with a 0
Serial.print(ds18[cnt].addr[i], HEX);
}
if (OneWire::crc8(ds18[cnt].addr, 7) != ds18[cnt].addr[7]) {
Serial.println(F("CRC is not valid!"));
return;
}
Serial.println();
#endif
if (ds18[cnt].sensorActive == TRUE)
{
type_s = 0;
ds.reset();
ds.select(ds18[cnt].addr);
ds.write(0x44,1); // start conversion, with parasite power on at the end
delay(750); // maybe 750ms is enough, maybe not
// we might do a ds.depower() here, but the reset will take care of it.
present = ds.reset();
ds.select(ds18[cnt].addr);
ds.write(0xBE); // Read Scratchpad
#if defined SerialDebug
Serial.print(F(" Data = "));
if(present < 16){Serial.write(zeroChar);} // prepend hex 0-15 with a 0
Serial.print(present, HEX);
Serial.write(nbsp);
#endif
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
#if defined SerialDebug
if(data[i] < 16){Serial.write(zeroChar);} // prepend hex 0-15 with a 0
Serial.print(data[i], HEX);
Serial.write(nbsp);
#endif
}
#if defined SerialDebug
Serial.print(F(" CRC="));
Serial.print(OneWire::crc8(data, 8), HEX);
Serial.println();
#endif
// convert the data to actual temperature
unsigned int raw = (data[1] << 8) | data[0];
unsigned char t_mask[4] = {0x7, 0x3, 0x1, 0x0};
byte cfg = (data[4] & 0x60) >> 5;
raw &= ~t_mask[cfg];
if( showCelsius == TRUE)
{
ds18[cnt].deg = ((float)raw / 16.0);
}else{
ds18[cnt].deg = ((((float)raw / 16.0) * 1.8) + 31.0); //the raw value is Celsius, convert to Fahrenheit
}
#if defined SerialDebug
Serial.print(" Temperature = ");
Serial.print(ds18[cnt].deg);
if( showCelsius == TRUE)
{
Serial.println(" Celsius");
}else{
Serial.println(" Fahrenheit");
}
#endif
}
if( ++cnt >= maxSensors){cnt = 0;}
}
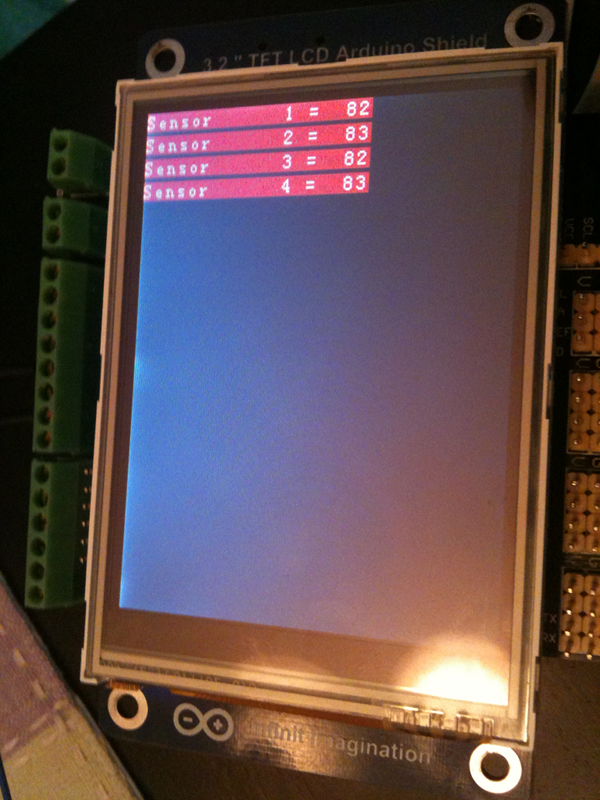
void displayLCD(void)
{
#if defined SerialDebug
Serial.println(F("Entering displayLCD()"));
#endif
// Clear the screen and draw the frame
// myGLCD.clrScr();
myGLCD.setColor(255,255,255);
myGLCD.setBackColor(0, 0, 0);
#if defined P30X21
for (int x=0, y=0;x<310;x+=15,y++)
#endif
#if defined P15X16
for (int x=0, y=0;x<319;x+=20,y++)
#endif
#if defined L40X16
for (int x=0, y=0;x<230;x+=15,y++)
#endif
#if defined L20X12
for (int x=0, y=0;x<239;x+=20,y++)
#endif
{
if(ds18[y].sensorActive == TRUE)
{
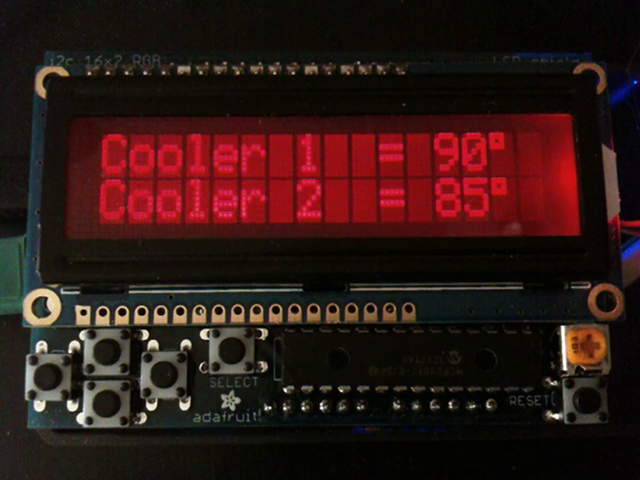
if(ds18[y].deg > ds18[y].tooHot)
{
myGLCD.setBackColor(255, 0, 0);
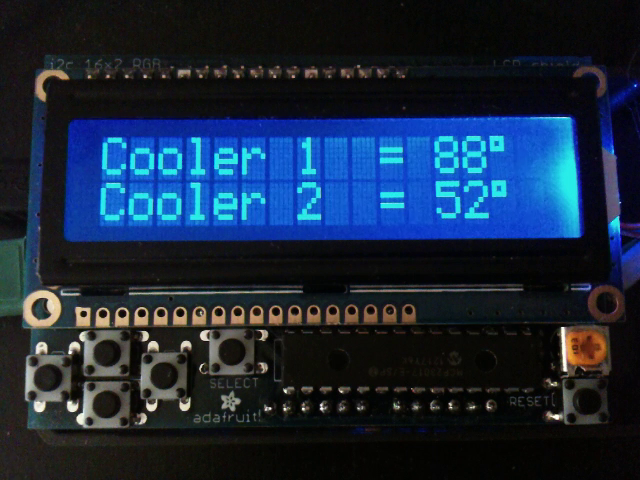
}else if(ds18[y].deg < ds18[y].tooCold){
myGLCD.setBackColor(0, 0, 255);
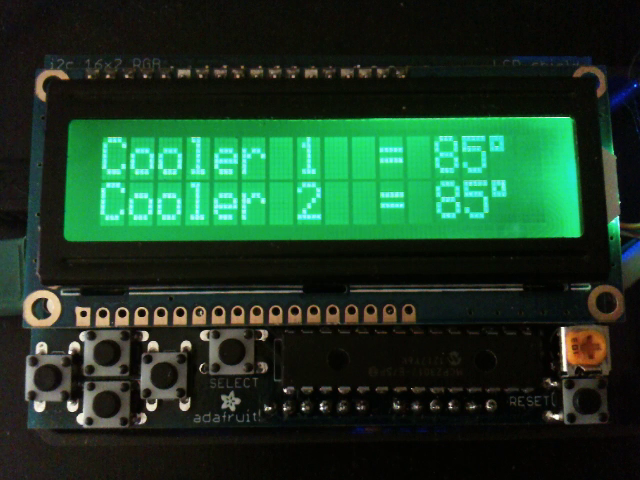
}else{
myGLCD.setBackColor(0, 255, 0);
}
#if defined P30X21
// myGLCD.print(blankLine,0,x);
myGLCD.print(ds18[y].sensorName,0,x);
int temp = (int) ds18[y].deg;
if(temp >= 100)
{
myGLCD.print(" = ", (13*8), x);
myGLCD.printNumI(temp, (17*8), x);
}else{
myGLCD.print(" = ", (13*8), x);
myGLCD.printNumI(temp, (17*8), x);
}
#endif
#if defined P15X16
// myGLCD.print(blankLine,0,x);
myGLCD.print(ds18[y].sensorName,0,x);
int temp = (int) ds18[y].deg;
if(temp >= 100)
{
myGLCD.print(" = ", (8*16), x);
myGLCD.printNumI(temp, (11*16), x);
}else{
myGLCD.print(" = ", (9*16), x);
myGLCD.printNumI(temp, (12*16), x);
}
#endif
#if defined L40X16
// myGLCD.print(blankLine,0,x);
myGLCD.print(ds18[y].sensorName,0,x);
int temp = (int) ds18[y].deg;
if(temp >= 100)
{
myGLCD.print(" = ", (24*8), x);
myGLCD.printNumI(temp, (28*8), x);
}else{
myGLCD.print(" = ", (25*8), x);
myGLCD.printNumI(temp, (29*8), x);
}
#endif
#if defined L20X12
// myGLCD.print(blankLine,0,x);
myGLCD.print(ds18[y].sensorName,0,x);
int temp = (int) ds18[y].deg;
if(temp >= 100)
{
myGLCD.print(" = ", (9*16), x);
myGLCD.printNumI(temp, (12*16), x);
}else{
myGLCD.print(" = ", (9*16), x);
myGLCD.printNumI(temp, (13*16), x);
}
#endif
}else{
if(showBlankLine == FALSE)
{
myGLCD.setColor(255,0,0);
myGLCD.setBackColor(255, 255, 0);
myGLCD.print(ds18[y].sensorName,0,x);
#if defined P30X21
myGLCD.print(" NOT ACTIVE ", (13*8), x);
#endif
#if defined L40X16
myGLCD.print(" NOT ACTIVE ", (25*8), x);
#endif
#if defined P15X16
myGLCD.print(" OFF ", (9*16), x);
#endif
#if defined L20X12
myGLCD.print(" NOT ACTIVE", (9*16), x);
#endif
myGLCD.setColor(255,255,255);
}else{
myGLCD.setBackColor(0,0,0);
myGLCD.setColor(255,255,255);
myGLCD.print(blankLine, 0, x);
}
}
}
}
#if defined SerialDebug || defined GetAddresses
void displayAddresses(void)
{
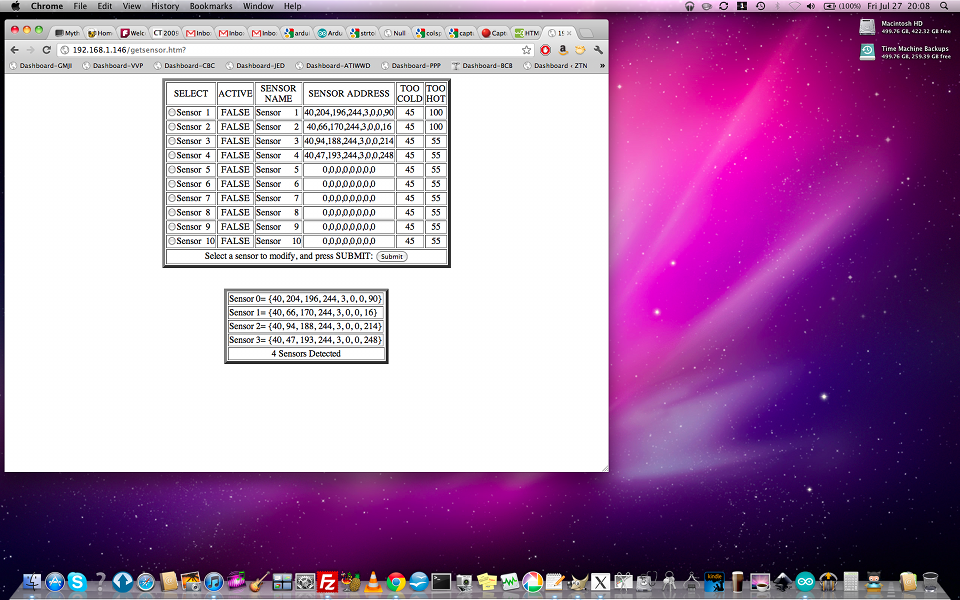
/********** Get Sensor Addresses **********
Used to get initial values for Sensor structure. Enable SerialDebug, and obtain DS18B20 addresses
from the serial terminal. Plug those values into the Sensor's "addr" array, re-compile and upload
with SeralDebug disabled. Note that when SerialDebug is enabled, response times on buttons and
display are greatly reduced, so be sure to disable SerialDebug when not needed.
******************************************/
byte addr[8];
int cntx = 0;
while ( ds.search(addr))
{
Serial.print(F("Sensor "));
Serial.print(cntx);
Serial.print(F("= {"));
for( int i = 0; i < 8; i++)
{
Serial.print(F("0x"));
if(addr[i] < 16){Serial.write(0x30);} // prepend hex 0-15 with a 0
Serial.print(addr[i], HEX);
if(i < 7){Serial.print(F(","));}
}
Serial.println(F("}"));
cntx++;
delay(500);
}
Serial.print(cntx);
Serial.print(F(" Sensor"));
if(cntx == 1)
{
Serial.println(F(" detected"));
}else{
Serial.println(F("s detected"));
}
ds.reset_search();
}
#endif
void loop()
{
#if defined SerialDebug || defined GetAddresses
displayAddresses();
#endif
getOneWire();
checkEthernet();
displayLCD();
}